Latest Detections
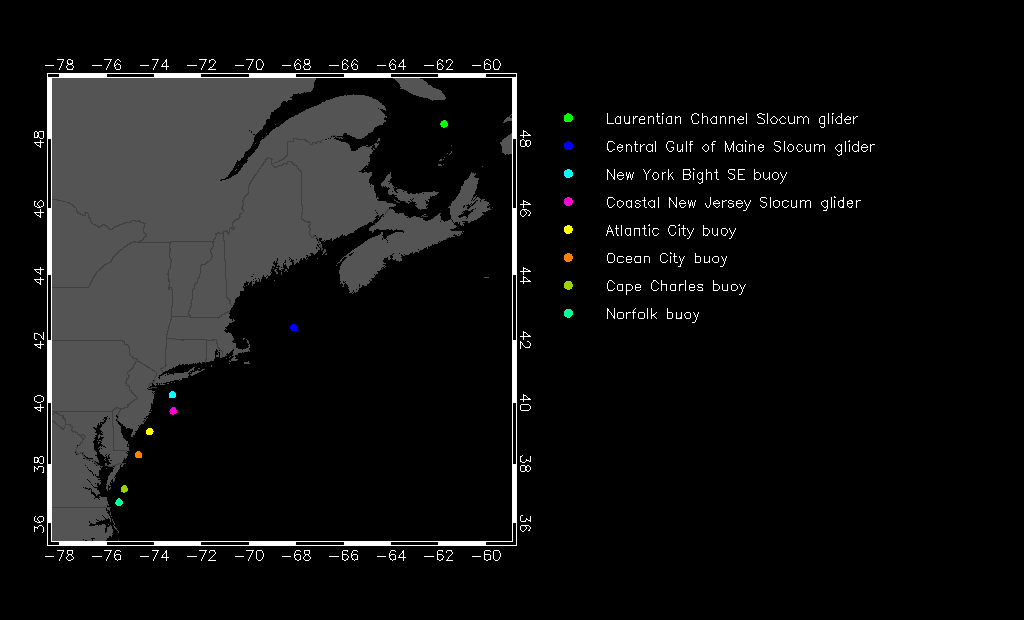
| Platform | Species detected in last 3 days | Operator(s)* |
|---|---|---|
| Laurentian Channel Slocum glider | Fin whale | Dalhousie University and University of New Brunswick |
| Central Gulf of Maine Slocum glider | Sei, fin and humpback whales | Woods Hole Oceanographic Institution and NOAA Northeast Fisheries Science Center |
| New York Bight SE buoy | Fin whale | Woods Hole Oceanographic Institution |
| Atlantic City buoy | Humpback whale | Woods Hole Oceanographic Institution |
| Ocean City buoy | Fin and humpback whales | Woods Hole Oceanographic Institution and University of Maryland Center for Environmental Science |
| Cape Charles buoy | Humpback whale | Woods Hole Oceanographic Institution and NAVFAC Atlantic |
| Norfolk buoy | Humpback whale | Woods Hole Oceanographic Institution and University of South Carolina |

Projects
Operation
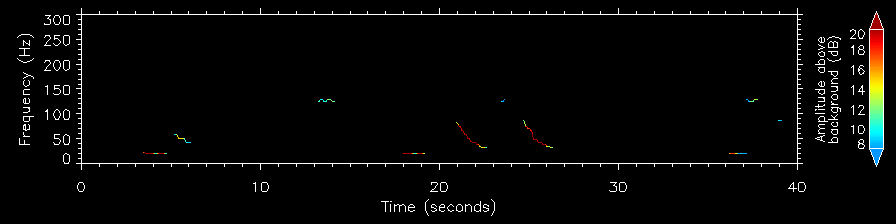
The robots carry the digital acoustic monitoring instrument or DMON, a passive acoustic instrument that is capable of recording and processing audio in realtime. We have implemented a low-frequency detection and classification system (LFDCS; Baumgartner and Mussoline 2011) on the DMON to identify marine mammal calls from a variety of autonomous platforms, including gliders, profiling floats, and moorings (Baumgartner et al. 2013). The LFDCS produces pitch tracks of sounds, which describe changes in the frequency (pitch) of a call over time. Scientists typically examine spectrograms to identify marine mammal calls, such as the one below, and pitch tracks are derived from these spectrograms.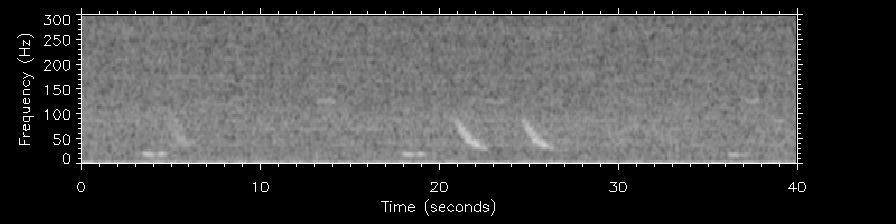
Sounds
What sounds are we listening for? From the North Atlantic, here are a few examples of the fin, humpback, right, and sei whale sounds that we can detect. Many are sped up to make them easier to hear (e.g., "24x" means the sound has been sped up 24 times). Many of the sounds large whales make are very low frequency and are therefore difficult to hear over computer speakers. Speeding up the sounds raises the pitch (frequency), which makes them much easier for us to hear. For each species, the clips below are of the same sounds, just sped up at different rates. To hear the sounds at 1x (normal speed), try using a great pair of over-the-ear headphones.Platforms
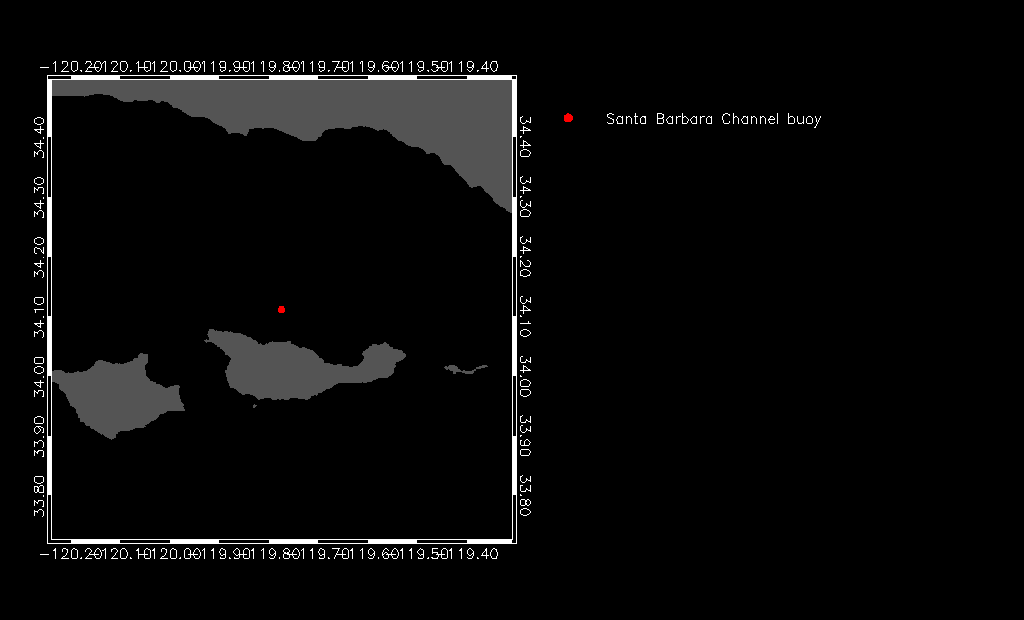
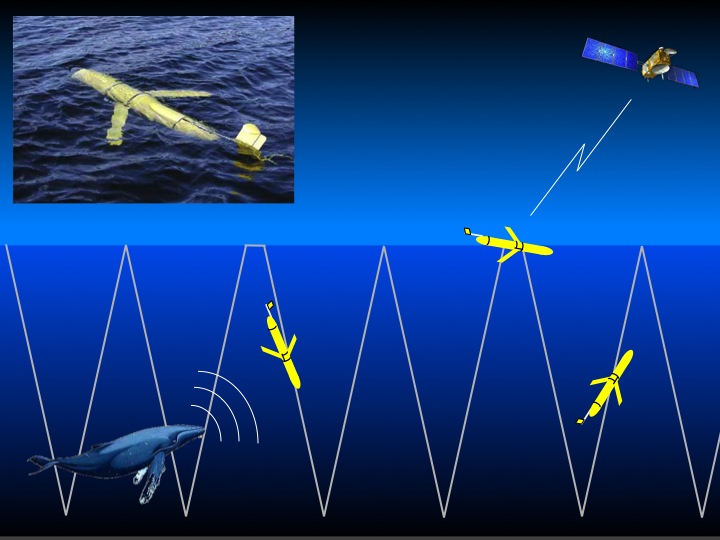
The DMON/LFDCS has been implemented on several ocean robots (also called autonomous platforms):
Resources
For more information
For more information about the DMON and LFDCS, see the following papers...Questions?
If you have any questions, please contact Mark Baumgartner at mbaumgartner@whoi.edu.