Autonomous Real-time Marine Mammal Detections
Woods Hole Oceanographic Institution
Nomans Land 2017
Study objectives
A Liquid Robotics wave glider was deployed in the Gulf of Maine to conduct near real-time passive acoustic surveys for baleen whales. Visual surveys will be conducted in proximity to the glider to validate the accuracy of the passive acoustic detections obtained by the DMON/LFDCS carried by the wave glider. These visual surveys will be conducted in the Great South Channel using shipboard observations, near Mount Desert Rock using land-based observations, and throughout the Gulf of Maine using observations from the NOAA Northeast Fisheries Science Center aerial survey.
Principal Investigators: Cara Hotchkin (NAVFAC Atlantic), Sofie Van Parijs (NEFSC), Peter Corkeron (NEFSC), and Mark Baumgartner (WHOI).
Platform crispusattucks
Platform location:

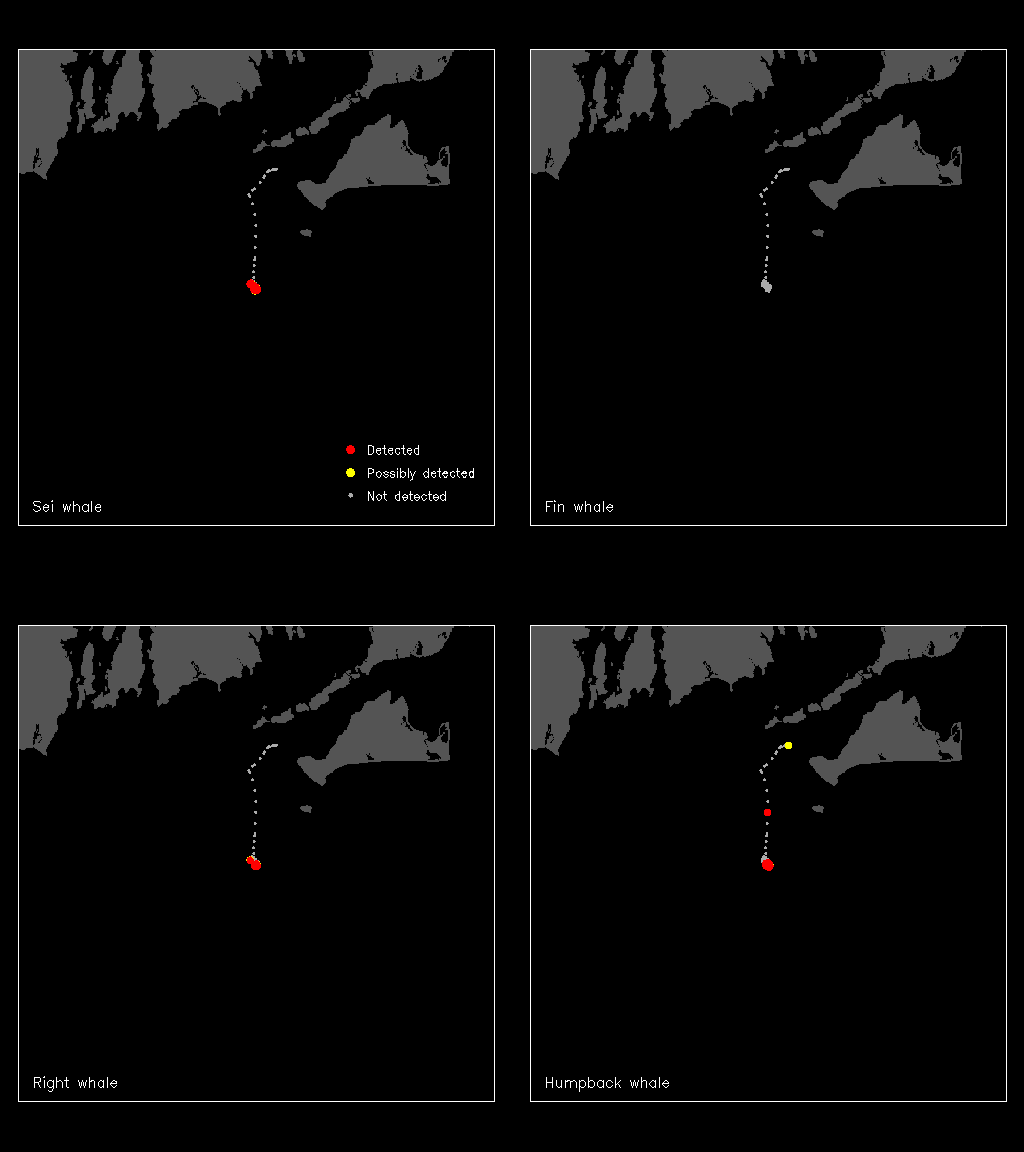
Analyst-reviewed species occurrence maps:
Daily analyst review:
| | Detected |
| Possibly detected |
| Not detected |
Links to detailed information for platform crispusattucks:
Automated detection data
DMON/LFDCS Diagnostics
Platform diagnostics
Sounds
What types of sounds are we monitoring? Find examples of the sounds right, fin, sei and humpback whales make here.
Questions
Please email Mark Baumgartner at mbaumgartner@whoi.edu. For a general desciption of the detection system and the autonomous platforms, visit dcs.whoi.edu.
Acknowledgements
The wave glider was deployed aboard the R/V Tioga thanks to captain Ken Houtler and Ian Hanley. Critical engineering support was provided by WHOI engineers Keenan Ball, Jim Partan, Tom Hurst, Tyler Johnson, and Leo-Paul Pelletier. Support for the deployment and operation of the wave glider is provided by the Department of Defense's Environmental Security Technology Certification Program (ESTCP) and the Navy's Living Marine Resources Program. The DMON instrument was developed by Mark Johnson and Tom Hurst at WHOI. Support for the development and testing of the DMON/LFDCS was provided by the Office of Naval Research's Marine Mammals and Biology Program , and additional support for integration and testing of the DMON/LFDCS with the wave glider was provided by the WHOI Marine Mammal Center.
Home